
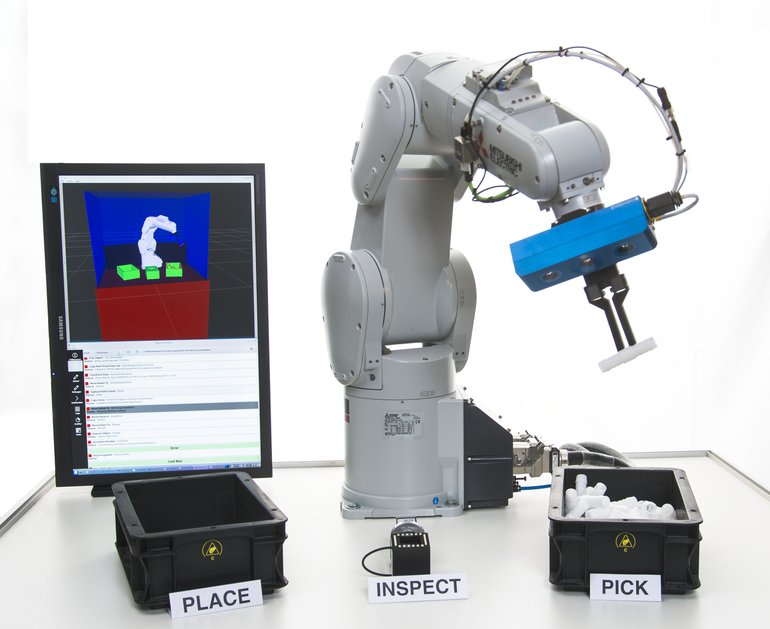
Mit der adaptiven Robotersteuerung Mikado ARC (Adaptive Robot Control) können Anwender den Griff in die Kiste und das lagerichtige Ablegen von Teilen ohne Robotik-Spezialwissen und ohne Programmierkenntnisse konfigurieren. So lässt sich der gesamte Prozess virtuell erstellen – selbst unterschiedliche Ensenso-Kameramodelle, Greifobjekte, 3D-Kamerabilder und Ablaufszenarien sind dann vollständig simulierbar. Das bedeutet, dass für den Entwicklungsprozess kein realer Roboteraufbau in Anspruch genommen werden muss, wodurch Stillstandzeiten in der Produktion minimiert werden. Die benutzerfreundliche Robot-Vision-Lösung kombiniert 3D-Kameratechnik mit einer einfach konfigurierbaren Robotersteuerung. Das System versteht sich mit einer Vielzahl gängiger Robotermodelle und sorgt dafür, dass diese sich selbständig im Raum orientieren und entsprechend den jeweiligen Gegebenheiten autonom handeln.
Auch wenn in Unternehmen kein Robotik-Spezialwissen vorhanden ist, können dank Drag-and-Drop und GUI individuelle Bin Picking- oder (De-)Palettierungsanwendung erstellt werden. Da für den Erstellungsprozess weder eine reale Ensenso 3D-Kamera noch eine Roboterzelle genutzt werden müssen, lassen sich Ausfallzeiten im Realbetrieb minimieren.
Anwender können künftig verschiedene Szenarien simulieren und den optimalen Aufbau ihrer gewünschten Roboter-Anwendung ermitteln, z. B. in Hinblick auf mittlere Taktzeiten und Entleerungsgrad. All das geschieht vollständig virtuell. Für eine reibungslose Inbetriebnahme der geplanten Anwendung kann sie abschließend im Software-Simulator überprüft und ggf. angepasst werden.








{kind=link}