
2008 startete das Familienunternehmen Eutect GmbH den ersten Schritt in die Roboterautomation. Der Erfolg gab dem Unternehmen Recht, da ein flexibler, effizienter und schneller Lötprozess bei vielen Elektronikherstellern auf der Investitionsliste steht. Aus diesem Grund steigt die Nachfrage nach vollautomatischen Roboterlötsystemen rund um das Miniwellenlöten.
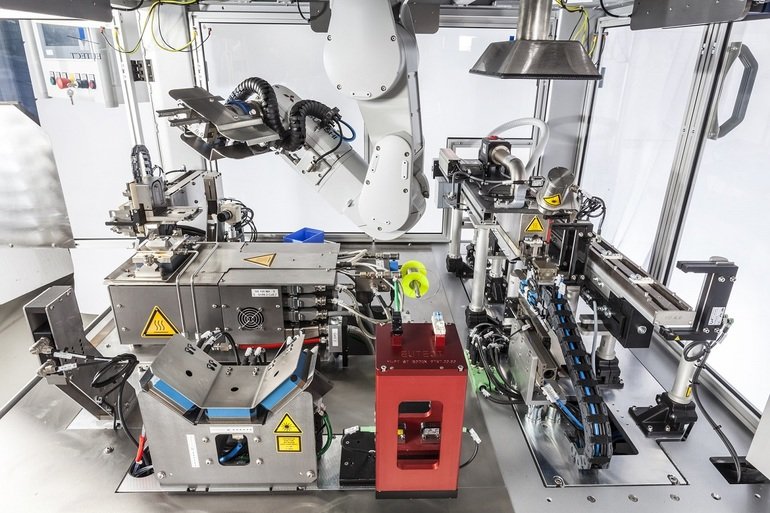
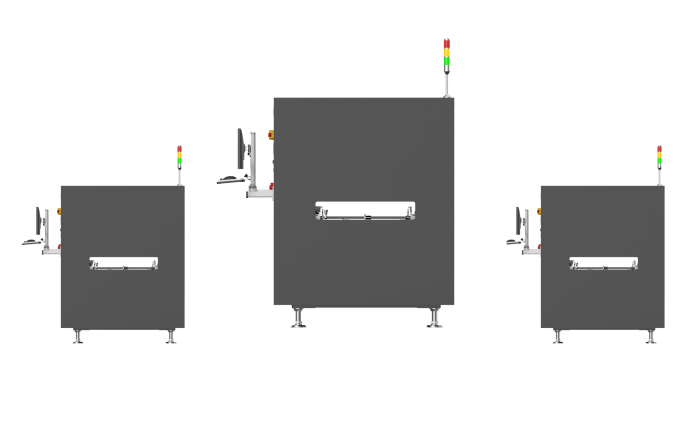
Besonders deutlich wird dies an der IW1 S151 RO. Hierbei handelt es sich um eine Anlage mit einer Stellfläche von 1,5 x 1,3 m. Die Maschine ist mit Flux-, Vorheizmodulen und Miniwellen ausgestattet. Jede Baugruppe wird innerhalb der Maschine mit einem 6-Achsen-Roboter, der entweder auf dem Zellenboden oder an der Decke montiert ist, von Modul zu Modul transportiert. Das System kann sowohl inline als auch als Insellösung genutzt werden. Die frei wählbare Prozessmodulanordnung innerhalb der Anlagen ist dabei entscheidend. Durch direkte Absprache mit den Kunden und Anwendern können Prozessmodule wie Flussmittelauftrags-, Vorheiz- und Lötmodule so platziert werden, dass Transportwege innerhalb der Maschine minimiert werden können. Gleichfalls muss aber auch dafür gesorgt werden, dass alle Module für den Service und die Wartung optimal zugänglich sind, wodurch Anlagenstillstandzeiten, Material- und Raumkosten sowie der Personalaufwand reduziert werden.
Dank des 6-Arm-Roboters ergeben sich viele Möglichkeiten innerhalb der Maschinenzelle zu arbeiten. Komplettiert wird diese Flexibilität durch die dazugehörigen Produktgreifer, die den Möglichkeitsradius erweitern und die Nutzung von Räumen und Prozessen maximieren. Bis zu vier verschiedene Greifer-Lötmaskenkombinationen können in einer Anlage magaziniert und vollautomatisch gerüstet werden, was die Verarbeitung einer großen Anzahl von Produktvarianten ermöglicht. Doch das Gewicht und die Abmessung dieser Werkstückträger sind für kompakte 6-Achsen-Roboter nicht optimal. Oftmals wurde ein Gewicht von 6 kg überstiegen und dadurch waren die Werkstückträger zu schwer für kompakte Roboter Anlagen. In der Folge hat das Unternehmen sein eigenes Werkstückträgerkonzept entwickelt. Diese Werkstückträgerkombinationen ermöglichen es dem Roboter, einen aufsetzbaren und produktspezifischen Satellitenträger direkt vom Band oder von einer Eingabeposition zu greifen und von dort zu den einzelnen Prozessen zu transportieren. Der Satellitenträger kann zusätzlich und jeweils in Bezug zum Produkt mit verschiedensten Funktionen wie Bestückabfragen, Kodierungen, speziellen Titanmasken und vielen weiteren Funktionen für eine sichere Bearbeitung ausgerüstet werden. Nach Abschluss des Prozesses wird der Träger wieder auf dem herkömmlichen Werkstückträger abgesetzt.
Bei einem Produkt- oder Variantenwechsel können die Satellitenträger leicht und schnell umgerüstet werden, wodurch komplette Werkstückträger sowie Puffer- oder Werkstückträgerspeicher für jede Produktvariante vermieden werden. Zusätzliche Ersatzteillager und weitere Investitionskosten werden ebenfalls obsolet.







{kind=link}