



Bei Schunk geht es in Sachen Kollaboration Schlag auf Schlag: Nach einer ersten Pilotanwendung in der eigenen Greifermontage zeigt das innovative Familienunternehmen nun anhand einer Demonstrationsanlage des Tochterunternehmens Schunk Electronic Solutions, wie Nutzentrenner für die Elektronikindustrie kollaborationsfähig gemacht werden können und welcher Vorteil damit verbunden ist.
Nutzentrenner mit Roboterarm
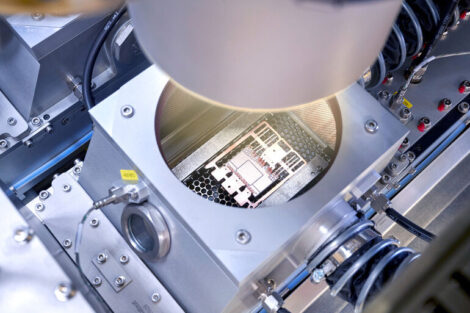
Die Anlage besteht aus dem Nutzentrenner SAR 1700 und einem sechsachsigen Roboterarm UR5 von Universal Robots, der mit einem Schunk Co-act EGP-C Greifer ausgestattet ist. Während Mitarbeiter bislang Stand-alone-Maschinen wie den SAR 1700 einzeln von Hand mit den Elektrobaugruppen bestücken mussten, genügt es nun, das Nutzenmagazin für den Roboter manuell nachzufüllen. Alles Weitere übernimmt die Maschine: Der Roboter greift ins Magazin, entnimmt einen Nutzen, legt ihn in die Maschine, schließt die Tür und drückt die Starttaste. Sobald die Fräse die Leiterplatten getrennt hat, legt der Roboterarm die Teile auf ein Förderband und der Prozess beginnt von vorn. Das Magazin bietet Platz für bis zu 32 Nutzen. Bei Bedarf kann jederzeit der Mitarbeiter übernehmen und die Maschine von Hand bestücken. „Mit dem kollaborativen Konzept lässt sich die Effizienz in der Elektronikproduktion erheblich steigern“, erläutert Henrik A. Schunk. „Statt einer oder zwei Maschinen, können Bediener nun beispielsweise bis zu fünf Nutzentrenner gleichzeitig bedienen. So macht sich die Lösung innerhalb kürzester Zeit bezahlt.“ Da der SAR 1700 speziell für kleinere Unternehmen konzipiert und der Invest vergleichsweise gering ist, können Elektronikproduktionen sukzessive mit zusätzlichen Maschinen ausgebaut werden. Jede lässt sich passend zum individuellen Bedarf flexibel manuell oder automatisiert bestücken.
DGUV-zertifizierter Greifer passt auf alle Cobots
Der in der Anwendung eingesetzte Co-act EGP-C Greifer ist der weltweit erste inhärent sichere Industriegreifer, der von der Deutschen Gesetzlichen Unfallversicherung DGUV für den kollaborierenden Betrieb zertifiziert und zugelassen ist. Der 2-Finger-Parallelgreifer, der über digitale I/O angesteuert wird, deckt ein breites Einsatzspektrum ab – von der Kleinteilemontage in der Elektronik- und Konsumgüterindustrie bis zu Montageanwendungen im Automotive-Sektor. Er erfüllt die Anforderungen der ISO/TS 15066 und ist so konstruiert, dass ein Menschen nicht verletzt werden kann. Dazu zählt eine Schutzhülle ebenso wie eine sichere Strombegrenzung. Um die Kollaboration mit dem Bediener möglichst flüssig und intuitiv zu gestalten, ist der 24V-Greifer mit einer LED-Beleuchtung in Ampelfarben ausgestattet. Über diese kann der Anwender den jeweiligen Zustand des Moduls signalisieren lassen. Er wird als komplett vormontierte Einheit mit jeweils passender Schnittstelle für die Cobots von Kuka, Fanuc oder Universal Robots geliefert. Darüber hinaus sind auf Anfrage Schnittstellen für Roboter anderer Hersteller möglich. Die komplette Regelungs- und Leistungselektronik ist im Inneren des Greifers verbaut, so dass dieser keinerlei Platz im Schaltschrank beansprucht. Um den Inbetriebnahme-Aufwand weiter zu minimieren, plant das Unternehmen Programmierbausteine für alle gängigen Cobots.
SMT Hybrid Packaging, Stand 4-459








{kind=link}