


Im Jahr 2015 startete das vom Bundesforschungsministerium für Bildung und Forschung (BMBF) geförderte Projekt PowerGrasp. Unter der Federführung von Würth Elektronik Circuit Board Technology (CBT) arbeiteten verschiedene Wirtschaftsunternehmen mit universitären und außeruniversitären Forschungseinrichtungen zusammen. „Ziel dieses Projekts war es, eine aktive Orthese mit weicher Mechanik für Arm und Hand zu entwickeln, um die Unterstützung von Arbeitskräften jeden Alters bei händischen, muskoskelettalen und belastenden Tätigkeiten zu erreichen“, erläutert Dr. Jan Kostelnik, Leiter von Forschung und Entwicklung im Unternehmen.
Das auf drei Jahre angelegte Forschungsprojekt wurde jetzt erfolgreich abgeschlossen. Verbundkoordinator war das Unternehmen und das Fraunhofer-Institut für Produktionsanlagen und Konstruktionstechnik IPK. Partner waren die Evangelische Hochschule Nürnberg, die Schunk GmbH & Co. KG, das Textilforschungsinstitut Thüringen-Vogtland e. V. (TITV), Universität der Künste Berlin (UdK), die warmX GmbH, das Reha-Zentrum Lübben und die Volkswagen AG (assoziierter Partner) sowie weitere Beteiligte aus Industrie und Handwerk.
„Die Würth Elektronik CBT war als Technologiepartner für die technische Umsetzung der Sensorik sowie die Entwicklung und Herstellung von Elektronik verantwortlich“, erklärt Dr. Jan Kostelnik. Im Laufe des Projekts untersuchten die Forscher modernste Textilien, in die gleichermaßen elektronische Bauteile sowie kraftverstärkende pneumatische, also luftbetriebene, Antriebselemente eingebaut werden können. Das Ergebnis ist eine softrobotische Orthese zum Anziehen. Weitere Arbeiten beschäftigten sich mit smarten Materialien beispielsweise zur Erfassung der Muskelaktivität. Mithilfe von Algorithmen kann Muskelermüdung erkannt und bei Bedarf die Unterstützung angepasst werden.
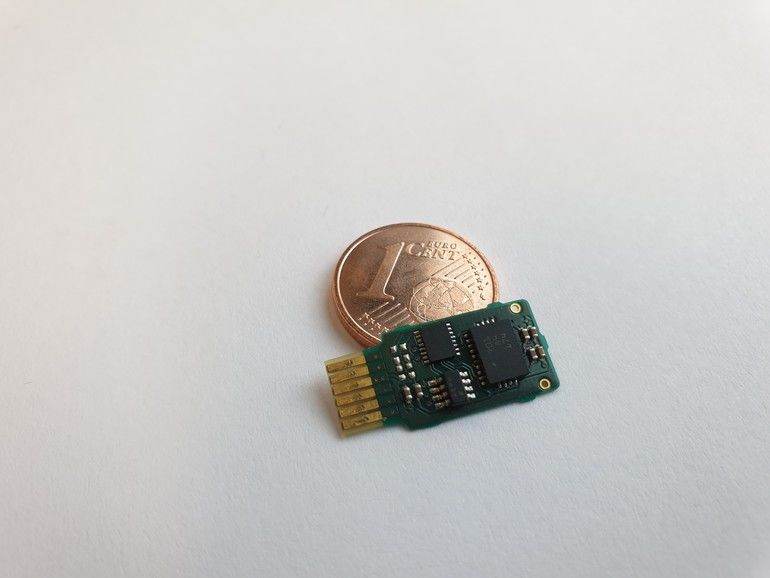
„Durch die Arbeiten im Projekt PowerGrasp sind wir wesentliche Schritte vorangekommen. Neben der Erforschung und Umsetzung eines mobilen softrobotischen Hand-Arm-Schulter-Unterstützungssystems für Überkopfarbeiten, konnten wir die Miniaturisierung der Elektronik und Pneumatik durch den Einsatz von den flexiblen und dehnbaren Leiterplatten TWINflex-Stretch ermöglichen“, fasst Dr. Jan Kostelnik zusammen.
Grundsätzlich wird die Technik auch Ältere und Menschen mit Behinderung im Alltag unterstützen können. Langfristig arbeiten die Projektpartner daraufhin ein Ganzkörper-Exoskelett/Suit, also einen Anzug zur Kraftunterstützung aller Bewegungen, zu entwickeln. Im Laufe des Jahres werden die Demonstratoren der Öffentlichkeit auf verschiedenen Messen und Konferenzen vorgestellt. Viele der im Projekt entwickelten Einzelkomponenten werden zu Innovationen bei Robotik, Sensorik, tragbarer Elektronik und der Mensch-Maschine-Interaktion sowie in weiteren Gebieten der Sensor und Elektronik gestützten Anwendungen führen.
Hintergrund des Forschungsprojektes
Rückenbeschwerden sind in Deutschland einer der häufigsten Gründe der Arbeitsunfähigkeit. Auch das Karpaltunnelsyndrom und die Epikondylitis des Ellenbogens („Tennis-Ellenbogen“) sind auf dem Vormarsch. Hauptursache für diese Erkrankungen sind sich immer wiederholende Bewegungen. Viele Arbeitgeber wollen deshalb ihre Arbeitskräfte vor Belastungen durch schweres Heben und nicht ergonomischen Bewegungen schützen. Bei der Prävention leisten Exoskelette wertvolle Dienste. Als Kraftverstärker beim Heben und Tragen oder als entlastende Stütze bei langem Stehen werden sie künftig zunehmend Arbeitende bei ihrer Tätigkeit unterstützen. Sämtliche verfügbare Modelle eint aber ein Problem: Prinzip bedingt unterstützen sie alle Bewegungen des Trägers – auch nicht ergonomische.
Exoskelette oder Assistenzroboter benötigen für eine Interaktion mit dem Menschen eine Mensch-Maschine-Schnittstelle. Sensoren ermöglichen den Einsatz von aktiven, geregelten Unterstützungsmechanismen. Für körpernahe Unterstützungssysteme und in der Soft-Robotik ist es daher erforderlich, „Soft-Sensorik“-Systeme zu entwickeln. Das Unternehmen schafft neue Möglichkeiten in der Konstruktion und Anwendung durch dehnbare Leiterplatten – TWINflex-Stretch. Die biegeschlaffen, biokompatiblen Leiterplatten passen sich der Körperform an. Eine Integration in Textilien ist möglich. Im Projekt PowerGrasp wird ein Netzwerk aus Sensoren mit TWINflex-Stretch-Leiterplatten betrieben. Die SmartSensX-Sensorknoten erfassen beispielsweise die Position des Menschen mit MEMS-Inertialsensoren und stellt die Daten über drahtlose oder kabelgebundene Schnittstellen zur Verfügung.







{kind=link}