Machine vision is an appealing technology for SMT assembly inspection, which achieves higher consistency and throughput than inspectors. It is now a viable technology to accommodate the wide range of components on assemblies. The use of a learning procedure, combined with CAD and library data, provides adaptive capability so that inspection results are improved. Backup algorithms are used to verify all failures. Now, AOI technology has the required speed, robustness and ease-of-use.
The first two types (missing, mis-oriented) are attributes that have simple values, for example, a component is either missing or present at a specified location. The second two (offset, rotation) are
Until recently, the use of automatic vision inspection systems (widely known as AOI, automated optical inspection) has been limited. The reasons for this: they are either slow or expensive, difficult to set-up and program, and the results are not robust (there are often many false failures). In a continuous development speed has been increased, robustness and ease-of-programming too, so that AOI may routinely be deployed in-line on SMT lines.
Placement is a good candidate for AOI because the defects it produces are unambiguous and measurable. For example, it might be desirable to detect solder defects with a vision system, but it is hard to define insufficient solder in parameters that can be observed and measured by a 2D vision system. Furthermore, users may have different definitions for the same defect, which makes it hard to evaluate whether the system is working or not.
Four placement defects are considered here: missing, mis-oriented (backwards), offset (translation) and rotated component (skew).
Pick-and-place machines must meet demanding accuracy specifications while running at high speed to maximize throughput, and in practice there is always a trade-off of accuracy versus speed.
It has been shown that an AOI system can be effective in detecting placement defects, and produce statistical data for part offset and rotation. The statistical data can indicate placement problems at an early stage, thus allowing adjustment or maintenance of the machine before any actual defects are produced.
Ideally, the AOI system should indicate not just the reference designator of a failing component, but also the machine, feeder and placement head. This information can usually lead operators directly to the cause of the problem. To control the placement process, the inspection should take place before reflow. The main reason is that many components tend to self-align during reflow, thus masking placement errors. Furthermore, problems detected before reflow can be corrected more quickly, and so less work-in-progress is affected. Vision inspection can also be applied after manual assembly.
Robustness and false rates
Robustness of an inspection system is measured in terms of false-accept and false-fail rates. The false-accept rate is the number of defects that are not detected, as a proportion of the total number of components inspected. The false-fail rate is the number of non-defects called as defects, as a proportion of the total number of components inspected. False-accept rates are more often defined at the assembly level, so the rate is the number of defective assemblies that are not detected, as a proportion of the total number of assemblies. Example: It is desired to keep the false-accept rate under 0.5 %. At the component level (for an assembly of 1000 components), this is a false-accept rate of 5 ppm. Ideally the false-accept rate is zero, but attempts to achieve this will generally result in an increased number of false failures.
False failures result in increased rework, or require additional effort to manually verify all defects detected by the AOI system. Either way, a high false-fail rate means high cost. Furthermore, if the number of false failures exceeds the number of real defects detected, users may lose faith in the system. It is useful to define a false-failure rate as the number of non-defects, divided by the total number of real defects and non-defects. This figure reflects the proportion of rework cost that is „wasted’ by the AOI system’s false-failures. Example: It is desired to keep the false-fail rate under 20 % (an assembly with 1000 components is produced at a yield of 96 %). Thus 4 % of assemblies will have defects, so the system should falsely fail less than 1 % of assemblies. At the component level, this is a false-fail rate of 10 ppm. Another useful measure of false-fail rate is the number of false-fails per hour. This quantifies the ‘nuisance’ factor of the AOI system to the line operators. Example: On a line with a beat rate of 30 s, it is desired to keep false-fail rate less than 1 board per hour. This translates to 0.8 % of boards, or 8 ppm at the component level.
Another facet of robustness is tolerance to varying conditions. For example, the bare board may vary in color or soldermask texture. Components may vary significantly in color and markings, and may vary slightly in size from one batch to the next. A robust AOI system should be able to tolerate such changes, or at least be able to respond rapidly to them.
Most AOI systems are installed to perform a specific task: lighting, optics and processing algorithms are tailored to this. SMT assembly verification is complicated because users must be able to re-program the system for each assembly, without requiring extensive knowledge, and each assembly may differ from the last for complexity, density, or types of components. The goal is to be able to program the system by loading the CAD/CAM data used to build the assembly. Ideally, no manual programming should be required for at least 95% of the inspection task – adjustments, if necessary, should be automatic.
Traditional approach
Traditional inspection algorithms locate components by finding their pins. The pins generally have very good contrast relative to the components and the bare board, so they are easy to locate in an image. First, a pin is identified in a search window – if it cannot be found, the measurement fails. Then, the end of the lead is determined. Finally, the location and rotation of the component are calculated from the pin positions. This method is not fooled by variations in component body color or shape. However, it does have some drawbacks. The calculation of component location depends on measurements of the individual pins. Misshapen pins, irregular solder paste deposits or image degradation will affect the measurement, which in turn affects the component location calculation. The paste and pad appear bright and may be interpreted as being part of the pin, which will also affect measurement.
Looking at pins is not often a good way to determine component presence. If a pin cannot be found, the component fails, but may not necessarily be missing or incorrectly placed. This increases the false-fail rate. For some parts, the pads look very similar to the pins, so a missing part may not be detected at all.
Shape-based algorithms
The shape-based algorithms locate components by attempting to match a shape outline to the image. The shape outline is made up of geometric shapes (usually lines), each of which must match light-dark or dark-light boundaries in the image. Figure 1 shows how a shape outline might be used for a chip capacitor. The algorithm moves the outline around an image until a good match is found. Then it tries different rotations of the outline to get an even better match. If a match is found, the component is assumed to be present, and the final position and rotation of the outline are assumed to be the location and rotation of the component.
By using outlines, the shape-based algorithm is tolerant of changes in component color and markings on the component body. Because the algorithm works with the entire component outline, it is accurate even when one or more edges are obscured, rounded, poor in contrast, or in some other way degraded.
Different shape outlines are used for different types of components. A basic outline is scaled in length and width for different size components of a similar type. In figure 1 the outline is scaled for a 1206, but the outline may be scaled for a 0805, 0603 or 0402 component, provided the relative proportions stay roughly the same.
The shape-based algorithm is fast and accurate for many components, but it does not work in all cases. For example, if a part has the same brightness as the bare board, all edges will be very weak and the outline cannot be used. If a board has silk-screen or other markings similar to the component outline, the shape-based algorithm may be confused and again cannot be used. So, different algorithms are required to get good results.
Libraries and learning
The shape outlines and sizes are normally drawn from a library, indexed by package type. This makes programming of the inspection system easy: for each component the algorithm needs only to know nominal location on the assembly and the package type. This data can be extracted from CAD data or a placement machine program.
CAD data plus library data can produce a working inspection program, but it probably won’t be robust enough for manufacturing use. Component sizes in real images differ slightly from the ideal specifications in the library, because of component tolerances, lighting effects, and optical effects. Often the library data is incomplete, and sometimes it is wrong. At best, this causes errors in the measurement of a component’s location, which increases the false-fail rate for component offset defects; or worse, the presence test is affected as well. In addition, components vary considerably in color and markings. Sometimes the shape-based algorithm works well, sometimes another algorithm is better.
To accommodate these problems, an automatic learn procedure is used that consists of acquiring an image of a known-good reference assembly. All component inspections are run on this reference image to determine which algorithm produces the best results, and verify that the inspections are reliable. Shape outline sizes may be adjusted to get the best fit to real component images.
If an inspection of any component does not produce confident results when run on the reference, than it is likely to have high false-accept or false-fail rates respectively. These components are removed from the inspection program. This reduces coverage marginally, but produces much more robust tests, and more meaningful statistical data for process control. The small number of uninspected components could be made inspectable by manually adjusting algorithm parameters, or (more likely) can be passed to an entirely different method, for example electrical test.
Backup algorithms
For many components, it is difficult to achieve acceptable false-accept and false-fail rates for missing under all conditions. A backup algorithm uses the shape-based one with a bare-board outline. This outline is learned from an image of the bare board, and it represents the locations of any etch traces and vias that are present under the component. If a missing component is suspected, the bare-board outline is matched to the image to confirm that the component really is missing.
A backup algorithm filters the failures from the previous algorithm so that the false-failure rate is the product of the two algorithms. Because of this, thresholds for the main algorithm can be set more aggressively to reduce the false-accept rate, this increases its false-fail rate but the extra false failures are caught by the backup algorithm. Each backup algorithm takes time to process, so they are only used when the main algorithm fails or there is low confidence in the result.
Orientation inspection
Orientation marks on components are easy to inspect if the components do not change. But orientation marks often vary in location and type, which makes a robust inspection very difficult. Using the combined methods of shape-based image analysis, learning with library data, and backup algorithms, a very robust and flexible orientation inspection can be built. The shape-based algorithms allow orientation markings to be described very simply, by reducing them to simple geometric features. Nearly all orientation marks are comprised of combinations of bevels, printed stripes and circles (see figures 2 to 4 for examples).
The library information describes which orientation markings may be present on a particular package type, and an approximate location of the marking. The learn procedure compares the outline for each marking type against the image, and learns more accurate locations for the markings. This speeds up the test because it allows the search areas to be reduced. It also tries all possible mis-orientations of the outline to verify that the learned orientation markings really do indicate orientation. The other orientation marking types can remain as backup algorithms. Thus if the markings change or move because the component vendor changes, the backup algorithms can still determine orientation, albeit at lower speed.
Fax +49-96285-301
Trotz der bereits seit langem verfügbaren AOI-Systeme steht die optische Inspektion technologisch erst am Beginn. Doch Feinstleiter-Boards und ständig noch weiter miniaturisierte Komponenten sorgen für das nötige Momentum, um diese Methode in der Baugruppenfertigung jetzt weitaus häufiger und dazu gezielt für die Verifikation von Bestückung oder Lötstellen einzusetzen.
Bien que le système AOI soit disponible depuis longtemps déjà, la technologie de l’inspection optique n’en est qu’à ses débuts. Cependant les boards à circuits ultra-fins et la miniaturisation toujours plus poussée des composants sont une raison suffisante pour accélérer l’usage de cette méthode actuellement beaucoup plus fréquente et adaptée spécialement à la vérification de l’équipement des plaques ou de soudures.
Nonostante l’esistenza dei sistemi AOI, disponibili da molto, l’ispezione ottica è tecnologicamente solo agli inizi. Ma schede a conduttori finissimi e componenti sempre più miniaturizzati creano le condizioni essenziali per impiegare questo metodo nella produzione di elementi costruttivi, oggi molto più frequente, e in modo mirato per il controllo dei montaggi o dei punti di saldatura.
Unsere Webinar-Empfehlung
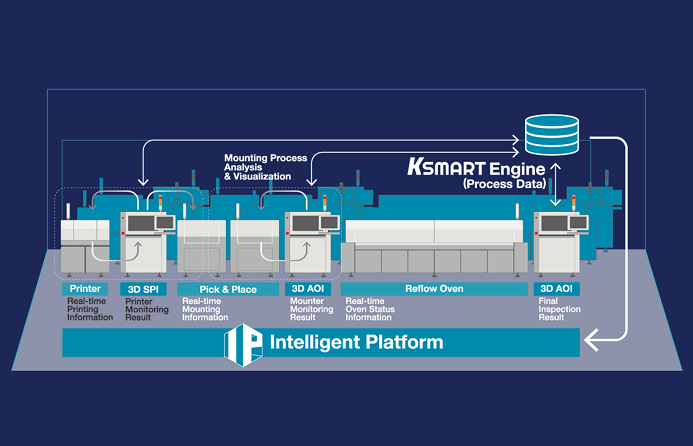
Die Nutzung der 3D-Mess- und Prozessdaten bringt die Produktionssteuerung auf die nächste Stufe. Echte 3D-Messung ermöglicht KI-basierte Prozessmodellierung zur Vorhersage von Parameteränderungen und -defekten oder zur Ursachenanalyse bis hin zu einzelnen Werkzeugen und Best…
Teilen: